Het doel: trajecten van meteoroïden terugvinden
Eén methode voor het bepalen van het traject van een meteoroïde met BRAMS-waarnemingen is gebaseerd op het verschil in tijdstip waarop de meteoorecho’s voor het eerst worden gedetecteerd bij de verschillende ontvangststations. Deze tijdsverschillen worden gemeten met behulp van gesynchroniseerde GPS-klokken. Ze zijn het gevolg van het feit dat de radiogolf die op een bepaald station wordt ontvangen, grotendeels wordt gereflecteerd door één punt van het meteoorspoor langs het traject. De positie van dit punt is verschillend voor elk ontvangststation en daarom beginnen de meteoorecho's bij elk station op iets verschillende tijdstippen.
Om de methode te laten werken, moeten ten minste zes ontvangststations de meteoroïde waarnemen. De kans dat een meteoroïde meteoorecho's produceert op zes stations neemt sterk toe wanneer deze stations dicht bij elkaar liggen (binnen een cirkel met een diameter van ~ 30-40 km).
Het middel: een cluster van nieuwe BRAMS-ontvangststations
Om de methode te testen, zijn er in 2020 zeven nieuwe stations geïnstalleerd in Limburg (waaronder ons eerste buitenlands station in Maastricht), waardoor deze cluster nu in totaal 10 BRAMS-stations telt. Al deze zogenaamde "BRAMS-ontvangststations 2.0" gebruiken nieuw materiaal om de kwaliteit van BRAMS-gegevens te verhogen en de langetermijnactiviteiten van het project te verzekeren:
- De originele analoge ICOM R75-ontvangers werden vervangen door digitale RSP2-ontvangers met een groter dynamisch bereik en hogere gevoeligheid. De analoge ontvangers werden gebruikt sinds het begin van het project, maar begonnen te falen en worden niet meer geproduceerd.
- Een Linux-gestuurd systeem dat draait op een Raspberry Pi wordt gebruikt in plaats van een Windows besturingssysteem dat op een pc draait, waardoor we de data-acquisitie beter kunnen controleren.
- Een GPS-gedisciplineerde oscillator wordt gebruikt om de frequentie van de lokale oscillator van de RSP2 te stabiliseren.

De nieuwe stations zijn goedkoper, compacter, zorgen voor een hogere gevoeligheid, grotere dynamisch bereik en een betere frequentiestabiliteit.
De methode: gebruik een bekend traject van het optische CAMS-Benelux netwerk
CAMS-Benelux is een netwerk van gevoelige meteorencamera's binnen de Benelux. De CAMS-camera's maken een zeer nauwkeurige bepaling van de trajecten en snelheidsmetingen van meteoren tot magnitude +5 mogelijk. Het BIRA host en verwerkt dagelijks de waarnemingen van vier camera’s in dit netwerk.
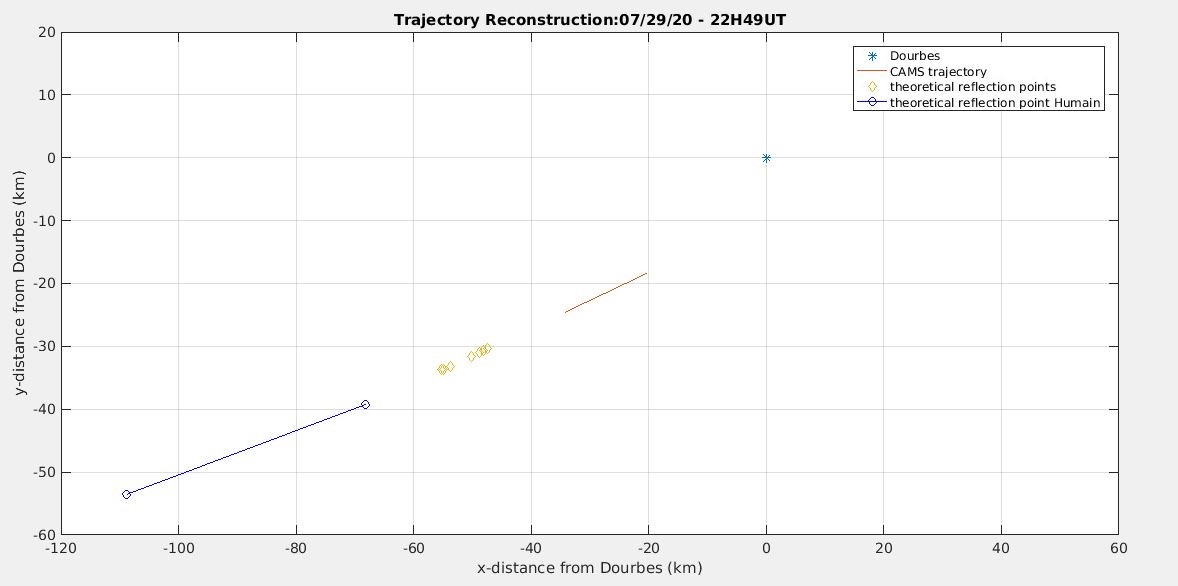
Voor deze toepassing worden trajecten uit de CAMS-Benelux data gebruikt om meteoorecho's in de gegevens van Limburgse stations te identificeren. De tijdsvertragingen tussen de meteoorecho's worden gemeten en ingevoerd in een stelsel van niet-lineaire vergelijkingen om het traject en de snelheid van de meteoroïde te achterhalen. Deze oplossing wordt vervolgens vergeleken met het traject en de snelheid die door CAMS werden berekend om de nauwkeurigheid van onze methode te beoordelen.